MINI SMD Four Element Anti Jamming Digital Pyroelectric Infrared Sensor
เมื่อสัญญาณอินฟราเรดแบบไพโรอิเล็กทริกที่ได้รับจากเซ็นเซอร์อินฟราเรด Pyroelectric แบบสี่องค์ประกอบป้องกันการรบกวนของ MINI SMD เกินเกณฑ์ทริกเกอร์ภายในโพรบ พัลส์การนับจะถูกสร้างขึ้นภายใน เมื่อโพรบได้รับสัญญาณดังกล่าวอีกครั้งก็จะคิดว่าได้รับชีพจรที่สองแล้ว เมื่อได้รับ 2 พัลส์ภายใน 4 วินาที โพรบจะสร้างสัญญาณเตือนและพิน REL จะมีทริกเกอร์ระดับสูง
แบบอย่าง:PD-PIR-462LA-D
ส่งคำถาม
MINI SMD Four Element Anti Jamming Digital Pyroelectric Infrared Sensor
|
คุณสมบัติ วิธีการบัดกรีแบบรีโฟลว์ SMD ขนาดเล็ก การประมวลผลสัญญาณดิจิตอล เปิดใช้งานการควบคุมพลังงานเพื่อประหยัดพลังงาน ตัวกรองในตัวป้องกันการรบกวนที่แข็งแกร่ง ปรับความไว เวลา และการควบคุมแสง แรงดันไฟฟ้าต่ำ, การใช้พลังงานขนาดเล็ก |
ใบสมัคร การตรวจจับการเคลื่อนไหวด้วยอินฟราเรด อินเทอร์เน็ตของสรรพสิ่ง อุปกรณ์สวมใส่ เครื่องใช้ในบ้านอัจฉริยะ, บ้าน โคมไฟอัจฉริยะ ความปลอดภัย ผลิตภัณฑ์กันขโมยรถยนต์ ระบบตรวจสอบเครือข่าย ฯลฯ |
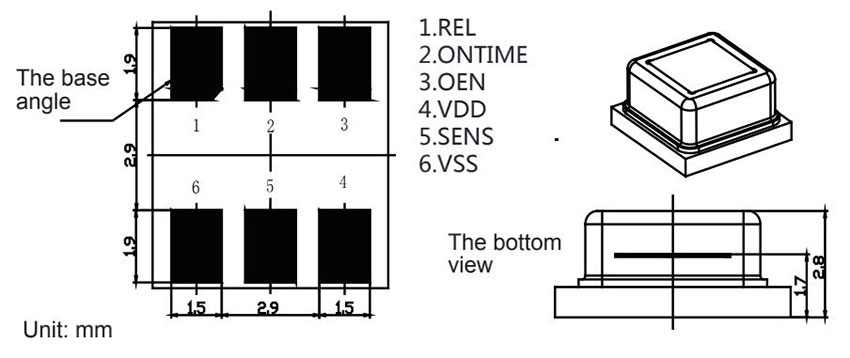
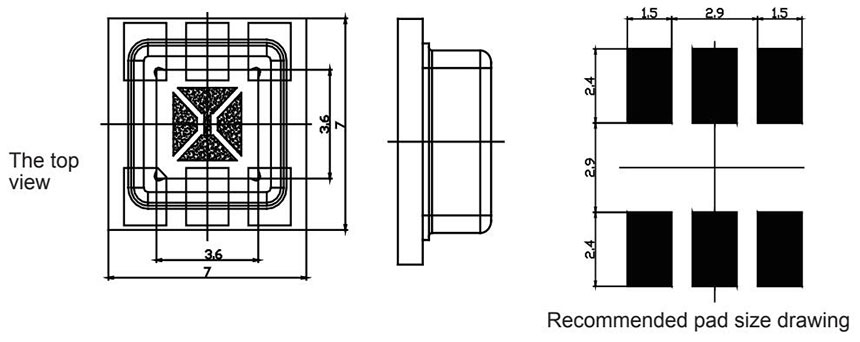
ผลิตภัณฑ์และแผนผังขนาดแผ่นที่แนะนำของ MINI SMD Four Element Anti Jamming Digital Pyroelectric Infrared Sensor
พารามิเตอร์พื้นฐานของ MINI SMD Four Element Anti Jamming Digital Pyroelectric Infrared Sensor
สิ่งที่นอกเหนือจากการให้คะแนนในตารางต่อไปนี้อาจทำให้อุปกรณ์เสียหายอย่างถาวร การใช้งานระยะยาวใกล้กับค่าที่กำหนดอาจส่งผลต่อความน่าเชื่อถือของอุปกรณ์
|
พารามิเตอร์ |
สัญลักษณ์ |
นาที |
แม็กซ์ |
หน่วย |
บันทึก |
|
แรงดันไฟฟ้า |
VDD |
2.2 |
3.7 |
V |
|
|
มุมมอง |
|
X=110° |
Y=90° |
° |
มุมรับภาพคือ a ค่าทางทฤษฎี |
|
อุณหภูมิในการจัดเก็บ |
TST |
-40 |
80 |
℃ |
|
|
ตรวจจับความยาวคลื่น |
λ |
5 |
14 |
μm |
|
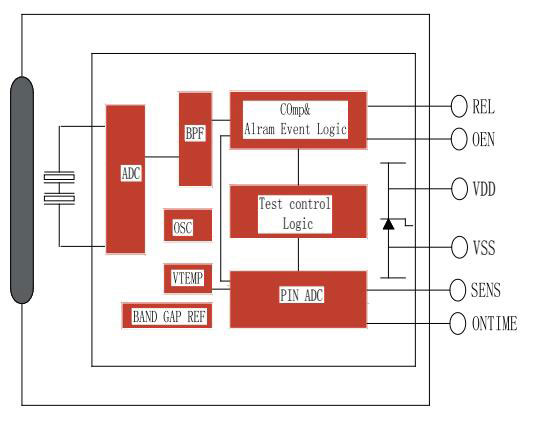
บล็อกไดอะแกรมภายใน
สภาพการทำงาน (T=25° C, VDD=3V เว้นแต่จะระบุไว้เป็นอย่างอื่น)
|
พารามิเตอร์ |
สัญลักษณ์ |
นาที |
พิมพ์ |
แม็กซ์ |
หน่วย |
บันทึก |
|
Supply แรงดันไฟฟ้า |
VDD |
2.2 |
3 |
3.7 |
V |
|
|
ปัจจุบันทำงาน |
IDD |
9 |
9.5 |
11 |
μA |
|
|
เกณฑ์ความไว |
VSENS |
90 |
|
2000 |
μV |
|
|
เอาท์พุทREL |
||||||
|
กระแสไฟขาออกต่ำ |
IOL |
10 |
|
|
mA |
VOL<1V |
|
กระแสไฟขาออกสูง |
IOH |
|
|
-10 |
mA |
VOH>(VDD-1V) |
|
REL เวลาล็อคเอาต์พุตระดับต่ำ |
TOL |
|
2 |
|
s |
ปรับไม่ได้ |
|
REL เวลาล็อคเอาต์พุตระดับสูง |
TOH |
2 |
|
3600 |
s |
|
|
ป้อน SENS/ONTIME |
||||||
|
แรงดันไฟฟ้า input range |
|
0 |
|
VDD/2 |
V |
ช่วงการปรับอยู่ระหว่าง 0V และ VDD/2 |
|
อินพุตอคติปัจจุบัน |
|
-1 |
|
1 |
μA |
|
|
เปิดใช้งาน OEN |
||||||
|
อินพุตแรงดันไฟฟ้าต่ำ |
VIL |
ระหว่าง 0.8V-1.2V คือบริเวณฮิสเทรีซิส |
0.8 |
V |
ระดับแรงดันไฟฟ้า OEN สูงไปต่ำ |
|
|
อินพุตไฟฟ้าแรงสูง |
VIH |
1.2 |
|
|
V |
แรงดันไฟฟ้า OEN ระดับต่ำถึงเกณฑ์สูง |
|
ใส่ปัจจุบัน |
II |
-1 |
|
1 |
μA |
Vss<VIN<VDD |
|
ออสซิลเลเตอร์และตัวกรอง |
|
|
|
|
|
|
|
ความถี่ตัดผ่านตัวกรองความถี่ต่ำ |
|
|
|
7 |
Hz |
|
|
ความถี่ตัดตัวกรองความถี่สูงผ่าน |
|
|
|
0.44 |
Hz |
|
|
ความถี่ออสซิลเลเตอร์บนชิป |
FCLK |
|
|
64 |
kHz |
|
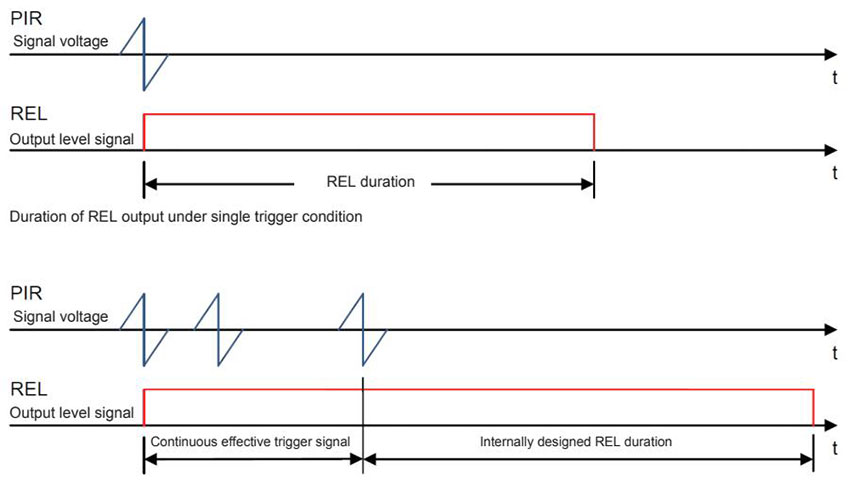
โหมดทริกเกอร์เอาต์พุต
เมื่อสัญญาณอินฟราเรดแบบไพโรอิเล็กทริกที่ได้รับจากโพรบเกินเกณฑ์ทริกเกอร์ภายในโพรบ พัลส์การนับจะถูกสร้างขึ้นภายใน เมื่อโพรบได้รับสัญญาณดังกล่าวอีกครั้งก็จะคิดว่าได้รับชีพจรที่สองแล้ว เมื่อได้รับ 2 พัลส์ภายใน 4 วินาที โพรบจะสร้างสัญญาณเตือนและพิน REL จะมีทริกเกอร์ระดับสูงนอกจากนี้ ตราบใดที่แอมพลิจูดของสัญญาณที่ได้รับเกิน 5 เท่าของเกณฑ์ทริกเกอร์ จำเป็นต้องมีเพียงหนึ่งพัลส์เพื่อทริกเกอร์เอาต์พุตของ REL รูปภาพต่อไปนี้เป็นตัวอย่างของแผนภาพลอจิกทริกเกอร์ ในกรณีของทริกเกอร์หลายตัว เวลาบำรุงรักษาของเอาต์พุต REL จะเริ่มต้นจากพัลส์ที่ถูกต้องล่าสุด
การตั้งค่าเวลาพิน ONTIME
เมื่อโพรบตรวจพบสัญญาณการเคลื่อนไหวของร่างกายมนุษย์ มันจะส่งสัญญาณระดับสูงบนพิน REL ระยะเวลาของระดับนี้กำหนดโดยระดับที่ใช้กับ PIN ONTIME (ดูตารางด้านล่าง) หากอุปกรณ์ระดับสูง REL มีการสร้างสัญญาณทริกเกอร์หลายตัว ตราบใดที่ตรวจพบสัญญาณทริกเกอร์ใหม่ เวลา REL จะถูกรีเซ็ต จากนั้นเวลาจะเริ่มต้นใหม่
1. กระแสไฟทำงานสัมพันธ์กับความต้านทานที่เลือก R ยิ่งมีความต้านทานมาก กระแสไฟที่ใช้งานก็จะยิ่งน้อยลง กระแสไฟเฉลี่ยที่ใช้โดย R ในช่วงระยะเวลาหน่วง REL ที่มีผลคือ: IR ≈ 0.75VDD/R ในช่วงระยะเวลาหน่วงที่ไม่ได้ผล R จะไม่กินกระแส หากคุณมีความต้องการใช้พลังงานสูงและมักอยู่ในช่วงหน่วงเวลาที่มีประสิทธิภาพ ขอแนะนำให้ใช้โหมดจับเวลา REL แบบดิจิตอล
2. If the digital REL timing mode is adopted, the ONTIME pin is connected to a fixed potential whose maximum value is less than VDD/2 (in actual use, the resistor divider can be used to adjust the REL timing). The ONTIME input voltage sets the REL output holding time through the only trigger. Refer to the table below for the output delay timing (Time Td) and voltage settings. บันทึก: When using the digital REL timing method, the ONTIME pin voltage must not be higher than VDD/2, and the timing time can only be selected from one of the 16 times in the table below. If the time in the table below is not suitable, it is recommended to use the analog REL timing method.
|
ไทม์เกียร์ |
Setting time (s) (พิมพ์ical value) |
ช่วงแรงดันไฟฟ้าขา TIME |
พิมพ์ |
ค่าที่แนะนำของตัวต้านทานตัวแบ่ง (ความแม่นยำ ±1%) |
|
|
|
|
|
|
ตัวต้านทานแบบดึงขึ้น RH |
ความต้านทานการดึงลง RL |
|
1 |
2 |
0~1/32VDD |
1/64VDD |
ไม่ได้โพสต์/1M |
0R |
|
2 |
5 |
1/32VDD~2/32VDD |
3/64VDD |
1M |
51K |
|
3 |
10 |
2/32VDD~3/32VDD |
5/64VDD |
1M |
82K |
|
4 |
15 |
3/32VDD~4/32VDD |
7/64VDD |
1M |
124K |
|
5 |
20 |
4/32VDD~5/32VDD |
9/64VDD |
1M |
165K |
|
6 |
30 |
5/32VDD~6/32VDD |
11/64VDD |
1M |
210K |
|
7 |
45 |
6/32VDD~7/32VDD |
13/64VDD |
1M |
255K |
|
8 |
60 |
7/32VDD~8/32VDD |
15/64VDD |
1M |
309K |
|
9 |
90 |
8/32VDD~9/32VDD |
17/64VDD |
1M |
360K |
|
10 |
120 |
9/32VDD~10/32VDD |
19/64VDD |
1M |
422K |
|
11 |
180 |
10/32VDD~11/32VDD |
21/64VDD |
1M |
487K |
|
12 |
300 |
11/32VDD~12/32VDD |
23/64VDD |
1M |
560K |
|
13 |
600 |
12/32VDD~13/32VDD |
25/64VDD |
1M |
634K |
|
14 |
900 |
13/32VDD~14/32VDD |
27/64VDD |
1M |
732K |
|
15 |
1800 |
14/32VDD~16/32VDD |
29/64VDD |
1M |
825K |
|
16 |
3600 |
15/32VDD~16/32VDD |
31/64VDD |
1M |
953K |
การตั้งค่าความไว
|
ไม่ |
แรงดันพิน SENS |
ไม่ |
แรงดันพิน SENS |
||
|
|
แรงดันไฟฟ้า range (VDD) |
แรงดันไฟฟ้ากลาง (VDD) |
|
แรงดันไฟฟ้า range (VDD) |
แรงดันไฟฟ้ากลาง (VDD) |
|
0 |
0~1/64 |
1/128 |
16 |
16/64~17/64 |
33/128 |
|
1 |
1/64~2/64 |
3/128 |
17 |
17/64~18/64 |
35/128 |
|
2 |
2/64~3/64 |
5/128 |
18 |
18/64~19/64 |
37/128 |
|
3 |
3/64~4/64 |
7/128 |
19 |
19/64~20/64 |
39/128 |
|
4 |
4/64~5/64 |
9/128 |
20 |
20/64~21/64 |
41/128 |
|
5 |
5/64~6/64 |
11/128 |
21 |
21/64~22/64 |
43/128 |
|
6 |
6/64~7/64 |
13/128 |
22 |
22/64~23/64 |
45/128 |
|
7 |
7/64~8/64 |
15/128 |
23 |
23/64~24/64 |
47/128 |
|
8 |
8/64~9/64 |
17/128 |
24 |
24/64~25/64 |
49/128 |
|
9 |
9/64~10/64 |
19/128 |
25 |
25/64~26/64 |
51/128 |
|
10 |
10/64~11/64 |
21/128 |
26 |
26/64~27/64 |
53/128 |
|
11 |
11/64~12/64 |
23/128 |
27 |
27/64~28/64 |
55/128 |
|
12 |
12/64~13/64 |
25/128 |
28 |
28/64~29/64 |
57/128 |
|
13 |
13/64~14/64 |
27/128 |
29 |
29/64~30/64 |
59/128 |
|
14 |
14/64~15/64 |
29/128 |
30 |
30/64~31/64 |
61/128 |
|
15 |
15/64~16/64 |
31/128 |
31 |
31/64~32/64 |
63/128 |
อินพุตแรงดันไฟฟ้าโดย SENS กำหนดเกณฑ์ความไว ซึ่งใช้เพื่อตรวจจับความแรงของสัญญาณ PIR อินพุตโดย PIRIN และ NPIRIN เมื่อต่อสายดิน จะเป็นเกณฑ์แรงดันไฟฟ้าขั้นต่ำ และความไวสูงสุดในเวลานี้ แรงดันไฟฟ้าที่เกิน VDD/2 จะเลือกเกณฑ์สูงสุด เกณฑ์นี้เป็นการตั้งค่าที่ละเอียดอ่อนต่ำสุดสำหรับการตรวจจับสัญญาณ PIR กล่าวคือ ระยะตรวจจับอาจน้อยที่สุด ควรสังเกตว่าระยะตรวจจับของเซ็นเซอร์อินฟราเรดไม่สัมพันธ์เชิงเส้นกับแรงดันไฟฟ้าอินพุต SENS ระยะทางสัมพันธ์กับอัตราส่วนสัญญาณต่อสัญญาณรบกวนของตัวเซ็นเซอร์ ระยะห่างของวัตถุในการถ่ายภาพของเลนส์ Fresnel อุณหภูมิพื้นหลังของร่างกายมนุษย์ที่กำลังเคลื่อนไหว อุณหภูมิแวดล้อม ความชื้นแวดล้อม และการรบกวนทางแม่เหล็กไฟฟ้า และปัจจัยอื่นๆ ก่อให้เกิดความสัมพันธ์ที่ซับซ้อนและหลากหลาย กล่าวคือ ผลลัพธ์ผลลัพธ์ไม่สามารถตัดสินด้วยดัชนีเดียวได้ และผลการดีบักจะมีผลเหนือกว่าในการใช้งานจริง ยิ่งแรงดันไฟฟ้าของพิน SENS ต่ำลง ความไวแสงก็จะยิ่งสูงขึ้น และระยะการตรวจจับก็จะยิ่งยาวขึ้น มีระยะการตรวจจับให้เลือกทั้งหมด 32 ระยะ และระยะตรวจจับที่ใกล้ที่สุดสามารถเข้าถึงระดับเซนติเมตรได้ ในการใช้งานจริง สามารถใช้ตัวแบ่งความต้านทานเพื่อปรับความไวได้
การตั้งค่าพิน OEN
OEN เป็นพินเปิดใช้งานสำหรับเอาต์พุต REL เมื่อ OEN ป้อนแรงดันไฟฟ้าต่ำ เอาต์พุต REL จะต่ำเสมอ เมื่อ OEN ป้อนแรงดันไฟฟ้าสูง เมื่อพิน PININ / NPIRIN ตรวจจับสัญญาณทริกเกอร์ร่างกายมนุษย์ปกติผ่านเซ็นเซอร์ REL จะส่งเอาต์พุตในระดับสูงจนไม่มีสัญญาณทริกเกอร์ของร่างกายมนุษย์ และผ่าน REL หลังจากเวลาที่กำหนด REL จะส่งเอาต์พุตต่ำ ระดับ หลังจากผ่านไปประมาณ 2 วินาที สัญญาณของร่างกายมนุษย์ก็สามารถสัมผัสได้อีกครั้ง พิน OEN สามารถเชื่อมต่อกับโฟโตรีซีสเตอร์หรือโฟโตไดโอดเพื่อให้ทราบถึงฟังก์ชันไม่ทำงานในระหว่างวันและทำงานในเวลากลางคืน
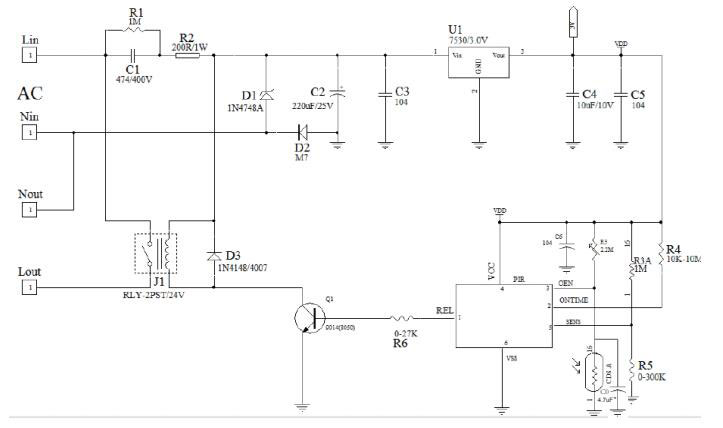
พิมพ์ical application circuit
ตัวอย่างการใช้งาน Triode
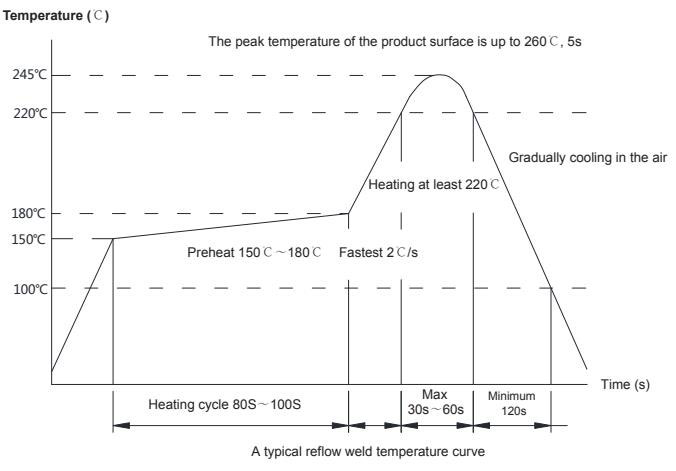
การบัดกรีแบบรีโฟลว์
คำแนะนำในการบัดกรีเซ็นเซอร์รีโฟลว์ Sensor
เมื่อทำการบัดกรีแบบรีโฟลว์ โปรดทำตามกราฟอุณหภูมิที่แสดงในรูปด้านล่าง สิ่งใดที่เกินอุณหภูมิรีโฟลว์ที่แสดงในรูปด้านล่างต้องปรึกษาวิศวกรฝ่ายขายล่วงหน้า
บรรจุภัณฑ์
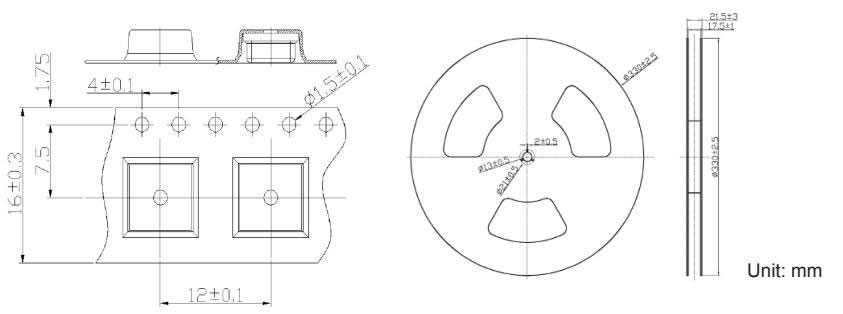
บันทึก: The standard package is 1000 pieces, and the package quantity and size vary slightly according to different models.
บันทึก for welding
อย่าเกินอุณหภูมิสูงสุดของเส้นโค้งอุณหภูมิที่แสดงในรูปด้านบน มิฉะนั้น อาจทำให้ประสิทธิภาพของเซนเซอร์ลดลง
ห้ามทำซ้ำการบัดกรีแบบรีโฟลว์และการให้ความร้อนและการถอดชิ้นส่วนซ้ำๆ ซึ่งจะส่งผลร้ายแรงต่ออายุการใช้งานและประสิทธิภาพของเซ็นเซอร์ และไม่ครอบคลุมอยู่ในการรับประกันผลิตภัณฑ์
ห้ามใช้สารเคมีที่มีฤทธิ์กัดกร่อนในการทำความสะอาดตัวกรองแสง (สามารถใช้เอทานอลสัมบูรณ์ได้) ซึ่งอาจทำให้เซ็นเซอร์ทำงานผิดปกติหรือล้มเหลว ห้ามใช้ทันทีหลังจากติดตั้งเซ็นเซอร์ ขอแนะนำให้ใช้หลังจาก 1 ชม.
Be careful not to touch the terminals with metal pieces or hands. บันทึก for welding:
ช่วงอุณหภูมิสภาพแวดล้อมในการทำงาน (ความชื้น)
> Temperature: Working temperature: -30℃~+70℃ (no fog or icing, temperature change may cause sensitivity and distance change) อุณหภูมิในการจัดเก็บ: -40℃~ +80℃
ความชื้น: ความชื้นในการทำงาน: ≤ 85%RH (ไม่ควรมีหมอกหรือแช่แข็ง)
ความชื้นในการจัดเก็บ: ≤ 60% RH
เกี่ยวกับอุณหภูมิสภาพแวดล้อมการใช้งานและขอบเขตของการปรับตัว หมายถึงอุณหภูมิและความชื้นที่สามารถทำให้เซ็นเซอร์ทำงานอย่างต่อเนื่อง ไม่ใช่การรับประกันการทำงานต่อเนื่องเพื่อความทนทานและทนต่อสภาพแวดล้อม เมื่อใช้งานในสภาพแวดล้อมที่มีอุณหภูมิสูงและมีความชื้นสูง เซนเซอร์จะเร่งการเสื่อมสภาพ
ข้อควรพิจารณาอื่น ๆ
> การทำงานผิดพลาดอาจเกิดขึ้นเนื่องจากสัญญาณรบกวนจากความร้อนไฟฟ้า เช่น ไฟฟ้าสถิตย์ ฟ้าผ่า โทรศัพท์มือถือ วิทยุ และแสงความเข้มสูง
> ผลิตภัณฑ์เทอร์มินัลของลูกค้าควรได้รับการติดตั้งอย่างแน่นหนาเพื่อหลีกเลี่ยงการทำงานผิดปกติที่เกิดจากลมและการสั่น
>มันจะเสียหายหลังจากการสั่นสะเทือนหรือการกระแทกที่รุนแรงและทำให้การทำงานผิดปกติ โปรดหลีกเลี่ยงแรงสั่นสะเทือนหรือแรงกระแทกที่มีความแข็งแรงสูง
> ผลิตภัณฑ์นี้ไม่ใช่ผลิตภัณฑ์กันน้ำและกันฝุ่น ควรกันน้ำ กันฝุ่น ป้องกันการควบแน่น และป้องกันน้ำแข็งเมื่อใช้งาน
> หากก๊าซกัดกร่อนระเหยในสภาพแวดล้อมการทำงาน จะทำให้การทำงานผิดปกติ